
 FINALIST
FINALIST
ChainFORM
Category : STUDENT
By 中垣拳、 Artem Dementyev (アメリカ)
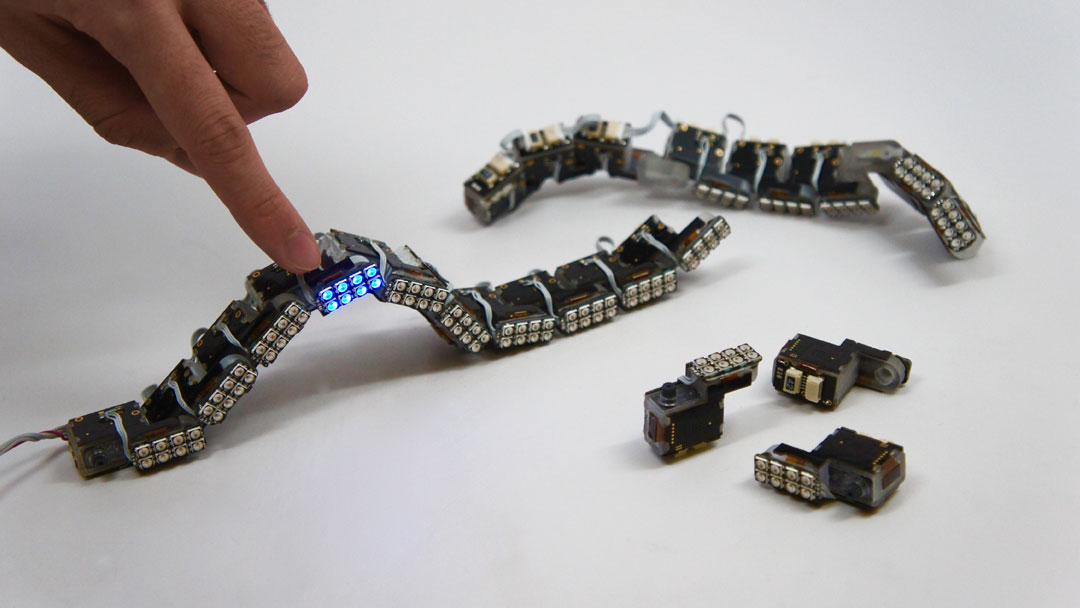
ChainFORMは、テープ、糸、針金などの日常的な線状の素材から着想を得た、モジュラー型ハードウェアプラットフォームです。インタラクティブかつ変形可能な機能を、誰もが簡単に工作するできるように日常的な素材に溶け込ませることを目指しました。モジュラー型ヘビ型ロボットの技術をベースとしたシステムを開発し、タンジブルなインタラクションと幅広い応用例を提案しています。
ダイナミックなコンピューター技術が、物質の形で日々の暮らしに組み込まれているーーそれが私たちの描くビジョンです。ChainFORMはこのようなビジョンのコンセプトプロトタイプの一例です。近い将来、ChainFORMのような新しい素材が、ロール状になって美術店や工芸用品店で売られるようになると信じています。
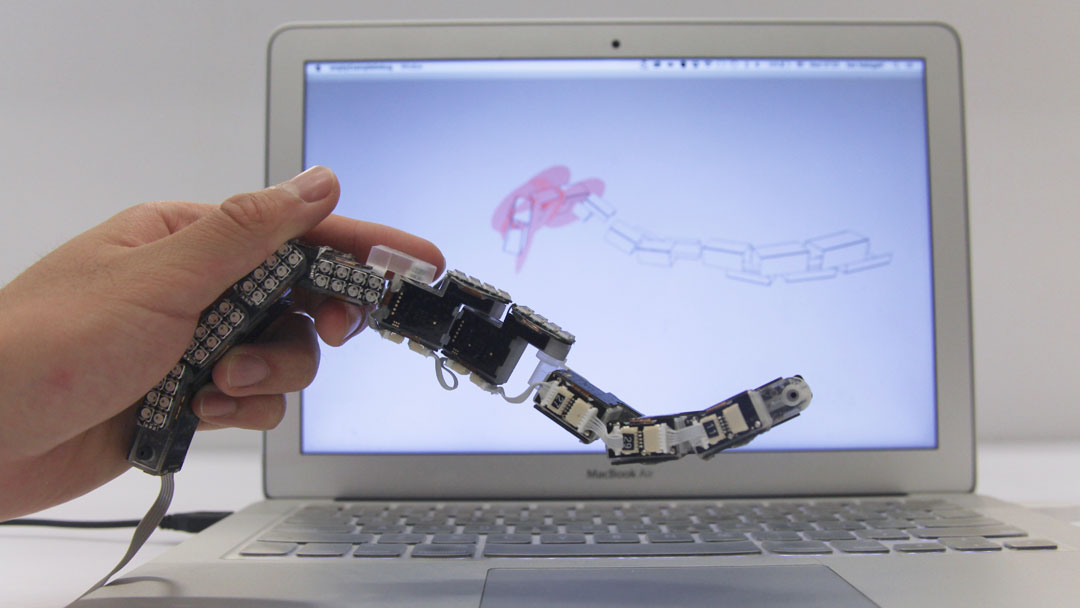
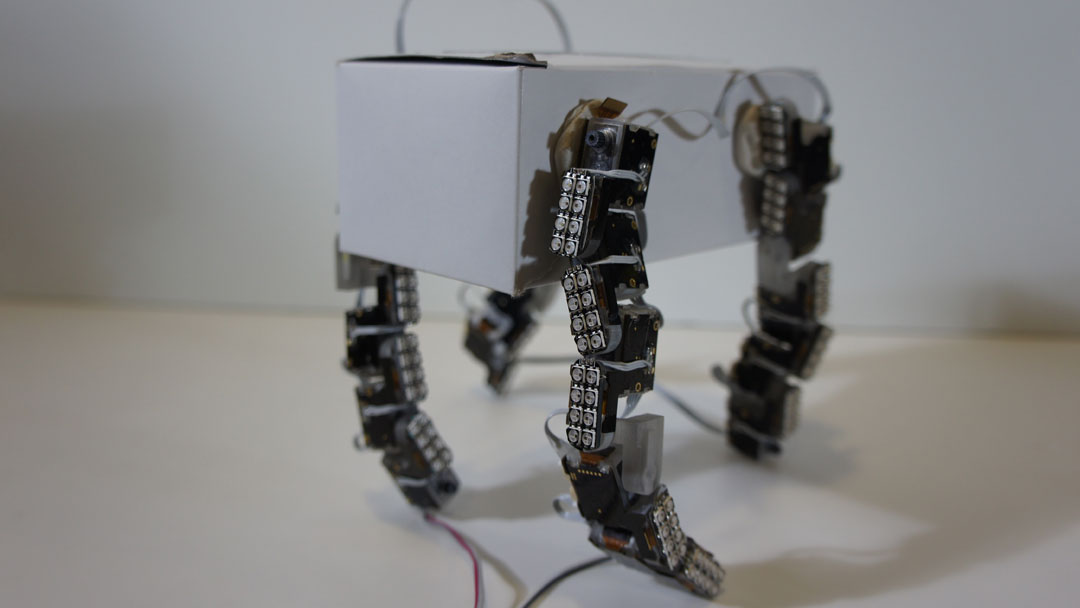
ChainFORMの個々のモジュールは、小さなサーボモーターと柔軟な電子基板、3Dプリンタで製作されたブラケットで構成されています。カスタムにデザインされた電子基板によって、センシングおよびアクチュエーションのインタラクティブな機能とモジュールシステムのための通信制御が実現されています。全てのモジュールはマスターとなるマイコンを通じて、コンピュータ上のソフトウェアによってコントロールされています。
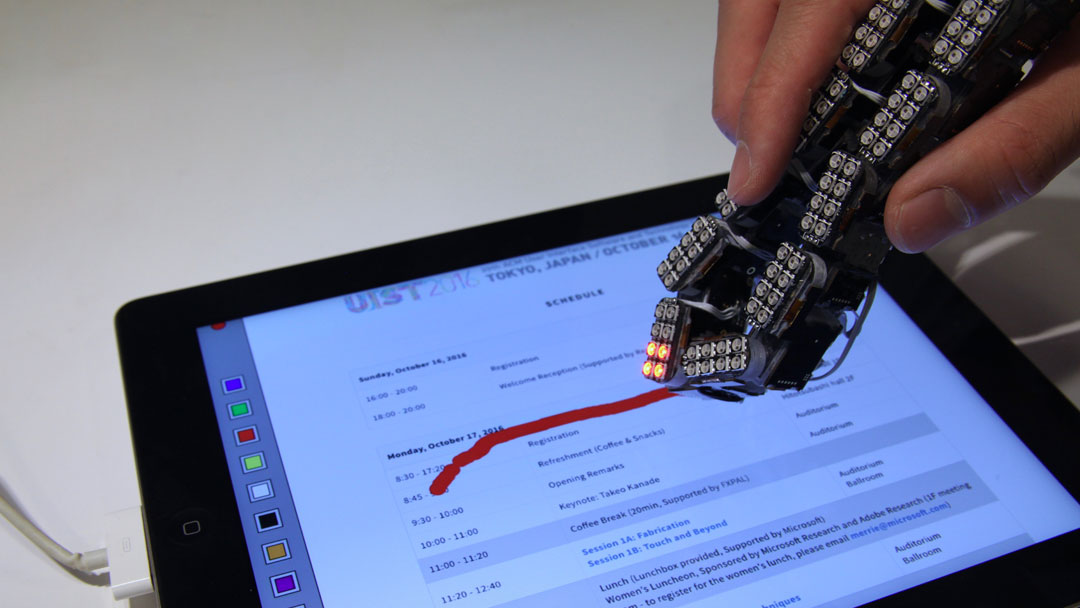
まず、ChainFORMはその高い順応性から、ディスプレイやスタイラス、スマートフォンといったインターフェースとして、ユーザーのニーズやアプリケーションに応じて物理的な形や機能を変えることができます。また、クラフト用素材として、日常的なモノや身体に取り付けることで、動き、光、インタラクションを加えることができます。日常的な素材の形を有することで、子どもからアーティストまで、誰でも自らの想像を触れることのできる体験・実体へと変えることができます。
3D printer, 3D Modeling and Design Software
MEMBER メンバー
- Project Lead, Concept Design, Interaction Design
- Ken Nakagaki
- Concept Design, Hardware Design
- Artem Dementyev
- Advisory
- Sean Follmer
- Advisory
- Joseph Paradiso
- Advisory
- Hiroshi Ishii
- Tangible Media Group and Responsive Environments Group, MIT Media Lab

JUDGES, COMMENTS
-
Julia Cassim
京都工芸繊維大学 KYOTO Design Lab. 特任教授新しいモーションコントローラ、インタラクションツールです。映像ではたくさんの応用方法を見ることができました。建築やプロトタイプへの応用できる可能性は高いほか、モジュール性と直感的に使える点が、イノベーションに必要な遊び心を刺激します。