
Category : STUDENT
By Aisen C. Chacin (Japan)
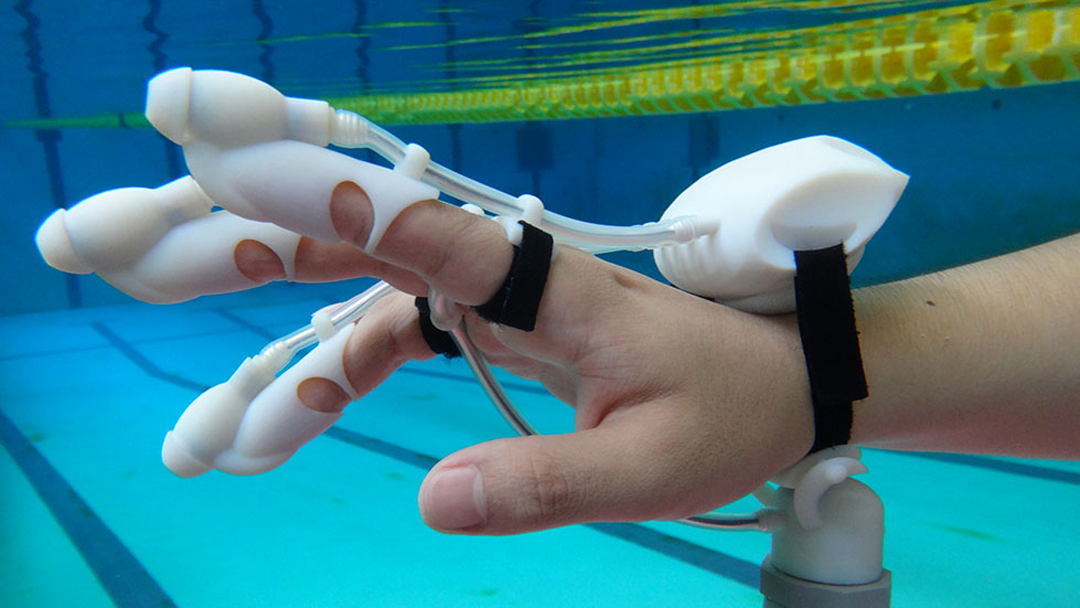
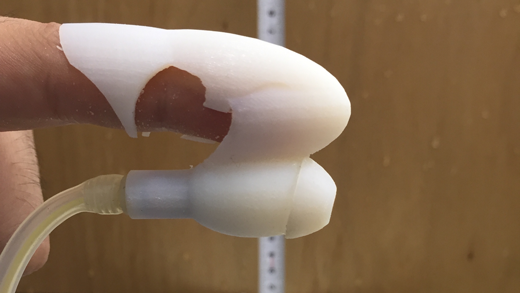
IrukaTact is a submersible haptic search glove that assists the location of sunken objects inspired by dolphin echolocation (Iruka in Japanese). The system detects the topography of flooded areas with an ultrasonic range finding sonar sensor that sends haptic signals to the wearer’s fingertips. These signals are produced by micro-pumps which propel water jets onto the finger pads. The strength of the jets dependents on the proximity to the object that the wearer is hovering over; the closer the object is to the wearer’s hand, the more pressure they will feel on their fingertips.
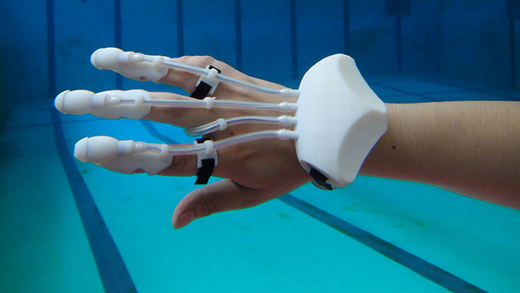
We wanted to design a new sensation for underwater haptics, and to understand the perceivable range for this method as a tactile display. The mechanoreceptors on the pad of our fingers are very sensitive to light touch, and by using the viscosity of aqueous environments to propel force feedback, these haptic modules display a detectable mixture of vibration and tension, a desirable quality for artificial tactile rendering. The motor suctions water from the surrounding environment creating a stream that disembogues onto the finger pads. This sensation is similar to placing a finger under a tap of running water. Our glove was designed to allow the user to be able to continue using their hands naturally and feel their environment beyond the tool’s feedback. IrukaTact sends signals to three fingers, while leaving the thumb and the little finger to be free, minimally covering the hand.
This technology has multiple application potentials beyond underwater echo-haptic location, including new interfaces for virtual reality such as digital object simulation in aqueous environments. The IrukaTact glove files have been released is an open source flooding aid kit with the potential to assist people in emergency situations. Extending the sense of touch to feel objects in parallel under cloudy waters where sight is no longer useful.
http://aisencaro.com/iruka.html
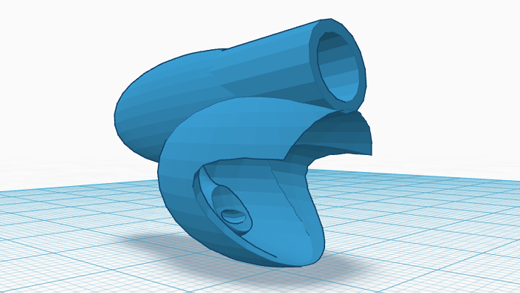
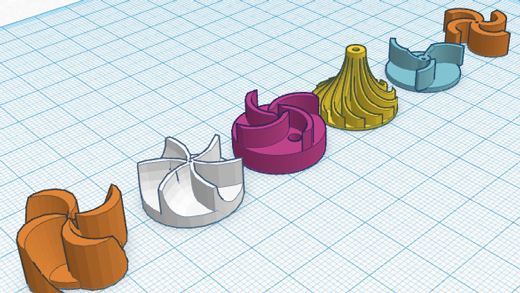
The look and feel of IrukaTact is largely inspired by its name, dolphin, as we designed each part, we were thinking of waves and fins. Through various iterations, we designed the housing using TinkerCAD and printed with a poly-jet printer. The sonar placement is designed to move it in parallel with the palm of the user with a mechanical system that uses a hinge that moves with the tension of silicone tubes, air-tight conduits, that connect the cables from the electronics housing that sits on the wrist of the user.
Hiroya Tanaka
Hiroya Tanaka
The technology behind this device has been really well developed, and I am impressed with the entry as it gives us insights into the creator’s personality, imagination, thoughts and hopes, and is actually quite poetic. Also, the style in which the project was implemented, almost like a trip or nomadic journey around the world, makes me think of the conceptual similarities with Fab.
Kyle Li
Kyle Li
Instantly fall in love with the form factor. The design of the finger pieces reminds me of olive shells and their contour line fuses a poetic bond between the form factor and the functionality. This underwater wearable takes signal translation to a whole new level by adding depth information to a diver through touch and keeps eyes on other important tasks under the water. It’s worth mentioning the 3D files and the Arduino code are available on creator’s website, make your own!
Natalia Arguello
Natalia Arguello
Big congrats to Aisen Caro Chacin and Takeshi Oozu for their brilliant entry to the YouFab 2016 awards. Your product is the perfect example of how young designers and creatives are maximizing the potential of 3D printing technologies to explore and find solutions that will have a significant impact in society today and in the future. Wish you the best in your exploration and hope to see your findings taken even further. IrukaTact is just the beginning, and a great one!
Nicolas Lassabe
Nicolas Lassabe
I am interested in using this bio-inspired glove to feel objects under water remotely without touching them. I was at first skeptical about using it like this but this is how innovation and research starts. In the end, I am sure there are many other applications for this glove, for example allowing underwater communication, or giving instructions to the divers by activating the different fingers.
Singh Intrachooto
Singh Intrachooto
Spectacular work by students. The way it looks did not appeal to me as much as the explorative nature of the technologies underwater. We were also intrigued by its potentials to reduce impact on sea creatures from human touch. This haptic glove gives sensations even without touching objects directly; this could give satisfaction to naughty hands as they explore underwater world.
Yukiko Shikata
Yukiko Shikata
I am fascinated by this idea of using Fab to simulate these intelligent mammals we call dolphins. An attempt to experience tactile sensations through ultrasonic waves underwater is a prototype for a method of ascertaining information and space in a specific environment, but more than anything else it provides an important vision for the future that evokes images of other life forms and environments. In addition, I also really like the aspect of collaboration that developed between students from Japan and the United States. We will continue to keep a close eye on this project as it moves forward.
